
In learning Physics, there will be many equations that one will use repeatedly (and should memorize). This is my attempt to pool every Physics equation I come across in my notes/studies. The equations are listed by order of when they appear in the notes, rather than any connection to one another.
Note that there may be some overlap between this page and other topic equation pages, such as Mathematics itself (displacement, velocity, and acceleration, for example) or Electrical Engineering, for topics like Electromagnetism. All equations are inherently mathematical, but many are only ever used in a math-applied field for a specified purpose, such as how Tsiolkovsky's rocket equation will be taught in Astronautic engineering class, but not in a higher-level calculus class.
Equations used in mathematics are found here, while those used in electrical engineering are found here.
In the unlikely event there are any egregious errors in this page, contact me at jdlacabe@berkeley.edu.
List of Physics Equations
Table Of Contents
Classical Mechanics
# Kinematics:
# I.I Basics of Mechanics.
# DENSITY:
$$ \text{d} = \frac{m}{V}$$d = Density
m = Mass
V = Volume
# I.II Accuracy & Uncertainty.
# RELATIVE ERROR:
$$ \text{Er} = \left( \frac{O - A}{A} \right) \times 100$$A = Accepted Value
Er = Relative Error
O = Observed Error
# I.III Displacement and V.S.A.
# DISPLACEMENT (IN UNIT VECTORS):
d = (x₂ - x₁)î + (y₂ - y₁)ĵ
[IN 3D]:
d = (x₂ - x₁)î + (y₂ - y₁)ĵ + (z₂ - z₁)k̂
d = Displacement
x₁ = The x-component of the first vector.
x₂ = The x-component of the second vector.
y₁ = The y-component of the first vector.
y₂ = The y-component of the second vector.
z₁ = The z-component of the first vector.
z₂ = The z-component of the second vector.
î = The unit vector indicating direction along the x-axis.
ĵ = The unit vector indicating direction along the y-axis.
# DISPLACEMENT (THE MAGNITUDE THEREOF):
|d| = √(x₂ - x₁)² + (y₂ - y₁)²
[IN 3D]:
|d| = √(x₂ - x₁)² + (y₂ - y₁)² + (z₂ - z₁)²
d = Displacement
x₁ = The x-component of the first vector.
x₂ = The x-component of the second vector.
y₁ = The y-component of the first vector.
y₂ = The y-component of the second vector.
z₁ = The z-component of the first vector.
z₂ = The z-component of the second vector.
# AVERAGE VELOCITY:
$$ v_{\text{avg}} = \frac{d}{\Delta t} = \frac{x_f - x_i}{t_f - t_i}$$Vavg = Average Velocity
d = Displacement
xi = The initial instantaneous position
xF = The final instantaneous position
∆t = Change in time
ti = The initial time value
tF = The final time value
# INSTANTANEOUS VELOCITY:
$$\frac{d \vec{r}}{dt} = \vec{v}_{\text{instantaneous}}$$dr = Instantaneous position of the Vector
dt = Instantaneous time (an exact time)
vinstantaneous = Instantaneous Velocity
# AVERAGE ACCELERATION:
$$a_{\text{avg}} = \frac{\Delta v}{\Delta t} = \frac{v_f - v_i}{t_f - t_i}$$aavg = Average Acceleration
∆v = Change in velocity
vi = The initial instantaneous velocity
vF = The final instantaneous velocity
∆t = Change in time
ti = The initial time value
tF = The final time value
# INSTANTANEOUS ACCELERATION:
$$\frac{d \vec{v}}{dt} = \vec{a}_{\text{instantaneous}}$$dv = Instantaneous Velocity of the Vector
dt = Instantaneous time (an exact time)
ainstantaneous = Instantaneous Acceleration
# SPEED:
$$ \text{s} = \frac{ \text{total distance}}{∆t}$$s = Speed
∆t = Change in time
# I.IV Uniformly Accelerated Motion.
# UNIFORMLY ACCELERATED MOTION:
$$V_F = V_i + (a \times \Delta t)$$
$$\Delta x = (V_i \times \Delta t) + \left( \frac{1}{2} \times a \times \Delta t^2 \right)$$
$$V_F^2 = V_i^2 + (2a \Delta x)$$
$$\Delta x = \frac{1}{2} (V_F + V_i) \times \Delta t$$VF = Final Instantaneous Velocity
Vi = Initial Instantaneous Velocity
a = Average Acceleration (really!)
∆t = Change in time
∆x = Displacement (or change in position)
# III.I Vector Basics.
# VECTOR SUBTRACTION:
$$\vec{\mathbf{A}} - \vec{\mathbf{B}} = \vec{\mathbf{A}} + (-\vec{\mathbf{B}})$$A, B = Any Two Vectors
# ASSOCIATIVE PROPERTY OF VECTOR ADDITION:
$$\vec{\mathbf{A}} + (\vec{\mathbf{B}} + \vec{\mathbf{C}}) = (\vec{\mathbf{A}} + \vec{\mathbf{B}}) + \vec{\mathbf{C}}$$A, B, C = Any Two Vectors
# 3D VECTOR REPRESENTED IN UNIT VECTORS:
$$\vec{\mathbf{r}} = \vec{\mathbf{x}} \hat{\mathbf{i}} + \vec{\mathbf{y}} \hat{\mathbf{j}} + \vec{\mathbf{z}} \hat{\mathbf{k}}$$r = Any Vector
xî = The Vector's x-direction component
yĵ = The Vector's y-direction component
zk̂ = The Vector's z-direction component
# III.III Rotation & Multiplication.
# VECTOR ROTATION:
θ = θ′ + ϕ
θ = The original angle between the vector and the x-axis pre-rotation.
θ′ = The angle between the vector and the new 'x'-axis post-rotation.
ϕ = The angular distance between the original x-xis and the rotated x-axis.
# DOT PRODUCT IN 2D:
a · b = abcosϕ
No direction - it is scalar.
a = The magnitude of a
b = The magnitude of b
ϕ = The angle between a and b
# DOT PRODUCT IN 3D:
a · b = aₓbₓ + aᵧbᵧ + azbz
a & b = Any Two Vectors
# CROSS PRODUCT IN 2D:
a × b = absinϕ
The direction is found using the right-hand rule.
a = The magnitude of a
b = The magnitude of b
ϕ = The angle between a and b
# CROSS PRODUCT IN 3D:
a × b = (aᵧbz - bᵧaz)î + (azbₓ - bzaₓ)ĵ + (aₓbᵧ - bₓaᵧ)k̂
a & b = Any Two Vectors
# III.IV Drag.
# FORCE OF DRAG:
$$F_{\text{drag}} = \frac{1}{2} \, \rho \, V^2 \, D \, A$$ρ (rho) = Density of the medium
V = Velocity of the object
D = Drag Coefficient
A = Cross Sectional Area
# IV.I Basics of Range.
# RANGE:
$$\text{Range} = \frac{V_i^2 \times \sin(2\theta_i)}{g}$$R = Range = Δx
Vi = ||Vi|| (Magnitude of Vi)
θi = Initial Angle or Launch Angle
g = Acceleration due to gravity on Earth, POSITIVE 9.81 m/s²
# V.I Angular & Tangential Velocity.
# Arc Length:
$$s = r \times \Delta \theta$$s = Arc Length
r = Radius
Δθ = Angular Displacement
# AVERAGE ANGULAR VELOCITY:
$$\vec{\mathbf{\omega}}_{\text{avg}} = \frac{\Delta \vec{\theta}}{\Delta t}$$ωavg = Average Angular Velocity
∆θ = Angular Displacement
∆t = Change in time
# INSTANTANEOUS ANGULAR VELOCITY:
$$\frac{d \vec{\theta}}{dt} = \vec{\mathbf{\omega}}_{\text{instantaneous}}$$dθ = Instantaneous Angular Displacement
dt = Instantaneous time (an exact time)
ωinstantaneous = Instantaneous Angular Velocity
# AVERAGE ANGULAR ACCELERATION:
$$\alpha_{\text{avg}} = \frac{\Delta \omega}{\Delta t}$$αavg = Average Angular Acceleration
∆ω = Change in Angular Velocity
∆t = Change in time
# INSTANTANEOUS ANGULAR ACCELERATION:
$$\frac{d \vec{\omega}}{dt} = \vec{\mathbf{\alpha}}_{\text{instantaneous}}$$dv = Instantaneous Angular Velocity
dt = Instantaneous time (an exact time)
αinstantaneous = Instantaneous Angular Acceleration
# UNIFORMLY ACCELERATED ANGULAR MOTION:
$$ω_f = ω_i + (α \times \Delta t)$$
$$\Delta θ = (ω_i \times \Delta t) + \left( \frac{1}{2} \times α \times \Delta t^2 \right)$$
$$ω_f^2 = ω_i^2 + (2α \Delta θ)$$
$$\Delta θ = \frac{1}{2} (ω_f + ω_i) \times \Delta t$$ωF = Final Instantaneous Angular Velocity
ωi = Initial Instantaneous Angular Velocity
α = Average Angular Acceleration
∆t = Change in time
∆θ = Angular Displacement (or change in angular position)
# TANGENTIAL VELOCITY:
$$\vec{\mathbf{v}}_{t} = \vec{r} \times \vec{\omega}$$vt = Tangential Velocity (average or instantaneous, depending on the angular velocity)
r = Radius
ω = Angular Velocity (average or instantaneous)
# TANGENTIAL ACCELERATION:
$$\vec{\mathbf{a}}_{t} = \vec{r} \times \vec{\alpha}$$at = Tangential Acceleration (average or instantaneous, depending on the angular acceleration)
r = Radius
α = Angular Acceleration (average or instantaneous)
# V.II Centripetal Velocity.
# CENTRIPETAL ACCELERATION:
$$\vec{\mathbf{a}}_{c} = \frac{\vec{\mathbf{v}}_{t}^2}{r}$$
$$\vec{\mathbf{a}}_{c} = r \times \vec{\omega}^2$$ac = Centripetal Acceleration
Vt² = Tangential Velocity
r = Radius
ω = Angular Velocity (average or instantaneous)
# CENTRIPETAL FORCE:
$$\sum \vec{\mathbf{F_\text{in}}} = m \times \vec{\mathbf{a}}_{c}$$Fin = The inward Centripetal Force
m = Mass
ac = Centripetal Acceleration
# Dynamics:
# VI.I Basics & Definitions.
# FORCE (2ND LAW OF MOTION):
$$\sum \vec{\mathbf{F}} = m \times \vec{\mathbf{a}}$$F = Force
m = Mass
a = Acceleration
# FRICTION FORCE:
$$\vec{\mathbf{F}}_{fk} = \mu_k \times \mathbf{F}_N$$
$$\vec{\mathbf{F}}_{fs} \leq \mu_s \times \mathbf{F}_N$$Ffk = Kinetic Friction Force
Ffs = Static Friction Force
μk = Kinetic Friction Coefficient
μs = Static Friction Coefficient
FN = Normal Force
# VI.II Free Body Diagrams and Basic Forces.
# FORCE OF GRAVITY (SIMPLIFIED):
$$\mathbf{F}_g = m \times g$$
Always in the direction of the planet, this simplified version of the formula (as opposed to the Law of Gravitation).Fg = Force of Gravity
m = Mass
g = Acceleration due to Gravity, on whichever planet.
# VI.III Laws of Motion.
# 3RD LAW OF MOTION/3RD LAW FORCE PAIR:
$$\vec{\mathbf{F}}_{ab} = -\vec{\mathbf{F}}_{ba}$$Fab = Force of object A unto object B
Fba = Force of object B unto object A
# VI.V Spring Force.
# SPRING FORCE:
$$\vec{\mathbf{F}}_s = -k \times \Delta \vec{\mathbf{x}}$$Fs = Force caused by a Spring.
k = Spring constant.
∆x = The displacement of the spring from the equilibrium position or rest position.
# SPRING WORK/ELASTIC POTENTIAL ENERGY:
$$W_s = \frac{1}{2} \times k \times \Delta x^2$$Ws = Force caused by a Spring.
k = Spring constant.
∆x = The displacement of the spring from the equilibrium position or rest position.
# VII.I Basics of Work.
# WORK:
$$W = \vec{\mathbf{F}} \times d \times \cos(\theta)$$
$$W = \vec{\mathbf{F}} \times \Delta \vec{\mathbf{r}} \times \cos(\theta)$$
$$W = \Delta \text{KE}$$W = Work.
F = The magnitude of the Force doing work on the object.
d = The magnitude of the Displacement of the force.
∆r = The change in position of an object in 3D space, using unit vectors.
θ = Angle between F & d. Always use a positive number.
ΔKE = Change in Kinetic Energy.
# WORK AS A NON-CONSTANT FORCE:
$$W = \int_{x_i}^{x_f} F_x \, dx$$W = Work.
xi = Original x-position of the object (which can be swapped for y or z-pos).
xf = Final x-position of the object (which can be swapped for y or z-pos).
Fx = The Force acting on the object in the x-direction (which can be swapped for y or z).
# VII.II Power.
# GENERAL POWER:
$$\vec{\mathbf{F}} \times \vec{\mathbf{v}}$$
Will produce either Instantaneous or Average Power depending on the variables used.F = Force.
v = Velocity of the object/system.
# AVERAGE POWER:
$$ P_{\text{avg}} = \frac{W}{\Delta t} = \frac{KE_f - KE_i}{t_f - t_i}$$Pavg = Average Power
W = Work
∆t = Change in time
KEF = The final instantaneous Kinetic Energy
KEi = The initial instantaneous Kinetic Energy
tF = The final time value
ti = The initial time value
# INSTANTANEOUS POWER:
$$\frac{dW}{dt} = P_{\text{instantaneous}}$$dW = Instantaneous Work
dt = Instantaneous time (an exact time)
Pinstantaneous = Instantaneous Power
# VII.III Mechanical Energy.
# CONSERVATION OF MECHANICAL ENERGY:
$$\text{ME}_i = \text{ME}_f$$
$$\text{KE}_i + \text{PE}_{gi} + \text{PE}_{ei} = \text{KE}_f + \text{PE}_{gf} + \text{PE}_{ef}$$
This holds where Wfriction & WFa = 0.MEi = Initial Mechanical Energy
MEf = Final Mechanical Energy
KEi = Initial Kinetic Energy
PEgi = Initial Gravitational Potential Energy
PEei = Initial Elastic Potential Energy
KEf = Final Kinetic Energy
PEgf = Final Gravitational Potential Energy
PEef = Final Elastic Potential Energy
# KINETIC ENERGY:
$$\text{KE} = \frac{1}{2} \times m \times v^2$$
There are multiple forms of Kinetic Energy that must be combined to form the 'total' kinetic energy of an object.$$\text{KE}_{total} = \text{KE}_T + \text{KE}_R$$ $$\text{KE}_{total} = \left(\frac{1}{2} \times m \times v^2\right) + \left(\frac{1}{2} \times I \times \omega^2\right)$$
KEtotal = Total Kinetic Energy.
KET = Translational Kinetic Energy.
KER = Rotational Kinetic Energy.
m = Mass.
v = Velocity.
I = Moment of Inertia.
ω = Angular Velocity.
# GRAVITATIONAL POTENTIAL ENERGY (SIMPLIFIED):
$$\text{PE}_g = m \times g \times h$$m = Mass of the object.
g = Acceleration due to gravity.
h = Vertical height from the horizontal zero line to the CENTER OF MASS OF THE OBJECT.
# VII.V Energy Systems.
# ENERGY TRANSFER SET:
Basic Principles:
1. ∆Esystem = Σ T []
2. ∆ME = ∆KE + ∆U []
Energy Transfer Calculations:
3. ∆Esystem = WFa []
4. WFa = ∆ME + ∆Einternal []
5. ∆Einternal = -Wnonconservative []
6. Wnonconservative = ∆ME [] (when WFa = 0, and is generally Wf)
Conservative Forces:
7. Wconservative force = -∆U []
8. Fconservative = -(dU / dx) []
9. $$\int_{x_i}^{x_f} F_{conservative} \, dx = -∆U$$ []
∆Esystem = Change in energy of the system.
Σ T = Sum of the energy transferred into or out of the system.
WFa = Work due to the Force Applied.
∆ME = Change in Mechanical Energy.
∆KE = Change in Kinetic Energy.
∆U = Change in Potential Energy.
∆Einternal = Internal Energy of the System.
dU = Instanteous Potential Energy.
dx = Instantaneous Position.
Wnonconservative = Work due to Nonconservative forces.
Fconservative = Sum of all conservative forces acting on the object.
# VIII.I Center of Mass.
# CENTER OF MASS:
$$\vec{\mathbf{x}}_{com} = \frac{\sum m_n \vec{\mathbf{x}}_n}{\sum m_n}$$
$$\vec{\mathbf{y}}_{com} = \frac{\sum m_n \vec{\mathbf{y}}_n}{\sum m_n}$$
$$\vec{\mathbf{z}}_{com} = \frac{\sum m_n \vec{\mathbf{z}}_n}{\sum m_n}$$
$$\vec{\mathbf{r}}_{com} = \frac{\sum m_n \vec{\mathbf{r}}_n}{\sum m_n}$$xcom = The center of mass of the x-component of the system.
ycom = The center of mass of the y-component of the system.
zcom = The center of mass of the z-component of the system.
rcom = The complete, 3-dimensional center of mass of the system.
mn = The mass of each individual object in the system.
xn = The x-component of each individual object in the system.
yn = The y-component of each individual object in the system.
zn = The z-component of each individual object in the system.
rn = The 3D position of each individual object in the system.
# VELOCITY OF CENTER OF MASS:
$$\vec{\mathbf{v}}_{com} = \frac{\sum m_n \vec{\mathbf{v}}_n}{\sum m_n}$$vcom = The velocity of the center of mass of the system.
mn = The mass of each individual object in the system.
vn = The velocity of each individual object in the system.
# CENTER OF MASS THROUGH AREA:
$$\vec{\mathbf{x}}_{com} = \frac{\sum A_n \vec{\mathbf{x}}_n}{\sum A_n}$$
All of the other directions/components can be found by substituting them in, respectively.Applicable only when all objects in the systems are the same density and thickness. This method avoids mass.
xcom = The center of mass of the x-component of the system.
An = The area of each individual object in the system.
xn = The x-component of each individual object in the system.
# CENTER OF MASS THROUGH CALCULUS:
$$x_{com} = \frac{1}{m_{\text{total}}} \int x \, dm$$
All of the other directions/components can be found by substituting them in, respectively.xcom = The center of mass of the x-component of the system.
mtotal = The total mass of the system.
dm = Each infinitesimally small particle.
# VOLUMETRIC MASS DENSITY:
$$\rho = \frac{m}{V}$$ρ = A substance's mass per unit of volume.
m = Mass.
V = Volume.
# SURFACE MASS DENSITY:
$$\sigma = \frac{m}{A}$$σ = The amount of mass distributed over a unit area.
m = Mass.
A = Area.
# LINEAR MASS DENSITY:
$$\lambda = \frac{m}{L}$$λ = The amount of mass per unit length.
m = Mass.
L = Length.
# VIII.II Momentum Basics.
# MOMENTUM:
$$\vec{\mathbf{p}} = m \times \vec{\mathbf{v}}$$p = Momentum.
m = Mass.
v = Velocity.
# 2ND LAW OF MOTION (MOMENTUM EDITION):
ΣF = (∆p / ∆t) (Average)
ΣF = (dp / dt) (Instantaneous)
ΣF = Net Force in a particular direction.
∆p = Change in momentum.
∆t = Change in time.
dp = Instantaneous momentum.
dt = Instantaneous time (an exact time).
# IMPULSE:
There are multiple equations that can be used according to the known variables. #3 is used for approximations using a graph:
$$\vec{\mathbf{J}} = \Delta \vec{\mathbf{p}}$$ $$\vec{\mathbf{J}} = \int_{t_i}^{t_f} \sum \vec{F} \, dt$$ $$\vec{\mathbf{J}} = \vec{\mathbf{F}}_{avg} \times \Delta t$$
J = Impulse.
F = Force.
Favg = Average Force.
ti = Time Initial.
tf = Time Final.
dt = Instantaneous time (an exact time).
# CONSERVATION OF MOMENTUM:
This is the case in all isolate systems and collisions/explosions. $$\sum \vec{\mathbf{p}}_i = \sum \vec{\mathbf{p}}_f$$
Σpi = The sum of the initial momentums of each object.
Σpf = The sum of the final momentums of each object.
# IX.I Moment of Inertia.
# MOMENT OF INERTIA/ROTATIONAL MASS/ROTATIONAL INERTIA:
For systems of particles: $$I = \sum_{n=1} m_n\,\, r_n^2$$ For rigid objects with constant density: $$I = \int r^2 \, dm$$
I = Moment of Inertia.
m = The mass of each particle.
r = The distance each particle is from the axis of rotation (the center of the rotation).
dm = Each infinitesimally small particle composing the object.
# ROTATIONAL KINETIC ENERGY:
$$\text{KE}_r = \frac{1}{2} \times I \times \omega^2$$KEr = The angular Kinetic Energy.
I = Moment of Inertia.
ω = Angular Velocity.
# KNOWN ROTATIONAL INERTIAS:
Type, Axis of RotationThin rod of length L, about its center of mass: I = (1/12) × M × L²
Thin rod of length L, about one end: I = (1/3) × M × L²
Thin hollow cylinder (hoop), about its long cylindrical axis: I = MR²
Solid cylinder/disk, about its long cylindrical axis: I = (1/2) × M × R²
Solid sphere, about its center of mass: I = (2/5) × M × R²
Thin hollow sphere/shell, about its center of mass: I = (2/3) × M × R²
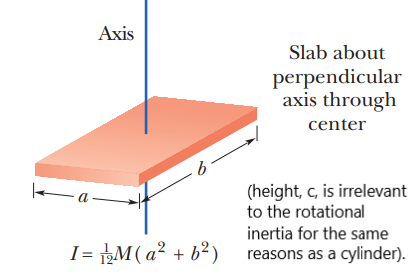
Solid slab/block, about its center of mass (perp.): I = (1/12) × M × (a² + b²)
Note that in all where length is irrelevant to the moment of inertia, such as with the cylinders, an object of that type of any length will have the same moment of inertia, from a ring to a mile-long tube.
I = Moment of Inertia.
M = Mass.
L = Length.
R = Radius.
# IX.II Torque.
# TORQUE:
$$\vec{\boldsymbol{\tau}} = \vec{\mathbf{r}} \times \vec{\mathbf{F}} \times \sin\theta$$
$$\sum \vec{\boldsymbol{\tau}}_{external} = \frac{\Delta \vec{\mathbf{L}}_{system}}{\Delta t}$$τ = Torque.
F = The magnitude of the force causing the torque.
r = The magnitude of the position vector from the axis of rotation to the point the force is applied to the object.
θ = The angle between the direction of r and the direction of F.
Στexternal = Net Torque external to the system.
∆Lsystem = Change in Angular Momentum in the system.
∆t = Change in time.
# 2ND LAW OF MOTION (ROTATIONAL EDITION):
$$\sum \vec{\boldsymbol{\tau}} = I \times \vec{\boldsymbol{\alpha}}$$Στ = The net Torque acting on the object.
I = Moment of Inertia.
α = Angular Acceleration.
# PARALLEL AXIS THEOREM:
$$I_{parallel} = I_{COM} + M \times D^2$$Iparallel = The moment of inertia parallel to an axis through center of mass.
ICOM = The moment of inertia going directly through an axis through center of mass.
M = The total mass of the rigid body.
D = The distance from the center of mass to the new axis.
# IX.III Angular Momentum.
# ANGULAR MOMENTUM:
$$\vec{\mathbf{L}} = I \times \vec{\mathbf{\omega}}$$L = Angular Momentum, represented with an 'L' instead of rho.
I = Moment of Inertia.
ω = Angular Velocity.
# CONSERVATION OF ANGULAR MOMENTUM:
$$\sum \vec{\mathbf{L}}_i = \sum \vec{\mathbf{L}}_f$$
$$I_i \times \vec{\mathbf{\omega}}_i = I_f \times \vec{\mathbf{\omega}}_f$$ΣLi = Net Angular Momentum Initial.
ΣLf = Net Angular Momentum Final.
Ii = Moment of Inertia Initial.
If = Moment of Inertia Final.
ωi = Angular Velocity Initial.
ωf = Angular Final.
# ANGULAR MOMENTUM OF A PARTICLE:
$$\vec{\mathbf{L}}_{particle} = \mathbf{r} \times m \times \mathbf{v} \times \sin\theta$$ΣLi = Net Angular Momentum Initial.
ΣLf = Net Angular Momentum Final.
r - The vector from axis of rotation to center of mass of particle.
m - The mass of the point particle.
v - The linear velocity of the point particle.
θ - The angle between the DIRECTIONS r and v, like torque.
# X.I Laws of Motion.
# UNIVERSAL LAW OF GRAVITATION:
The force of gravity that exists for any two objects, the full version of the 'force of gravity', not limited to the surface of a planet. $$F_g = \frac{G \times m_1 \times m_2}{r^2}$$
G = The Universal Gravitational Constant, or 6.67 x 10⁻¹¹ (N × m²) / (kg²).
m1 = Mass of the first object.
m2 = Mass of the second object.
r = The distance between the centers of mass of the two objects, not the radius (unless it is by circumstance).
# ORBIT ECCENTRICITY:
$$e = \frac{c}{a}$$e = The ratio of the distance between the foci to the length of the major axis.
c = The distance between the center of the ellipse to the foci.
a = The length of the semimajor axis.
# 3RD LAW OF PLANETARY MOTION:
The First Equation is best used when comparing two bodies orbiting the same central object, like the Earth and an Asteroid. In such cases, put the new object in the numerator on both sides, as to ease isolation.
The Second Equation is preferable when the orbital period or distance of the reference orbit is unknown, or if the central mass being orbited changes. $$T^2 \propto a^3$$ $$T^2 = \frac{4\pi^2}{GM} \times a^3$$
T - The "Orbital Period", or the time it takes to orbit one revolution around the Primary. Measured in Earth-years.
a - The length of the Semimajor Axis, the average distance between the orbiting object and the primary. Measured in AU.
G - The Universal Gravitational Constant (6.67 x 10⁻¹¹ (N × m²) / (kg²))
M - Mass of the Primary (ex. the Sun), except in binary systems, where it represents the total mass of the system.
# G-FORCES:
Vertical # of g-Forces: (FN / FgEarth)
Horizontal # of g-Forces: (ax / gEarth)
FN = The Normal Force an object has, such as that produced by rocket fuel when launching upward.
FgEarth = The gravitational force caused by the Earth.
ax = Acceleration of an object in the x-direction.
gEarth = The acceleration due to gravity of the Earth.
# GRAVITATIONAL FIELDS:
Constant G.F.'s (like on Earth's surface): $$g = \frac{F_g}{m}$$ Nonconstant G.F.'s (all of them, on a bigger scale): $$g = \frac{G \times m_o}{r^2}$$
g = The Gravitational Field: the gravitational attraction a mass exerts. For non-constant fields, the field refers to the force experienced by an object (at any location) due to the gravitational pull of the mass. Measured in N/kg, which is m/s².
G = The Universal Gravitational Constant, or 6.67 x 10⁻¹¹ (N × m²) / (kg²).
mo = Mass of the object.
r = The distance between the centers of mass of the two objects, not the radius.
# UNIVERSAL GRAVITATIONAL POTENTIAL ENERGY:
This equation can be used for objects NOT in a constant gravitational field: $$U_g = -\frac{G \times m_1 \times m_2}{r}$$
G = The Universal Gravitational Constant, or 6.67 x 10⁻¹¹ (N × m²) / (kg²).
m1 = Mass of the first object.
m2 = Mass of the second object.
r = The distance between the centers of mass of the two objects, not the radius.
# ESCAPE VELOCITY:
There are two equations, the 2nd of which is more applicable for objects near the surface of a planet. Use whichever based on the variables you have: $$ v_{\text{escape}} = \sqrt{\frac{2 G m_p}{R_p}} $$ $$ v_{\text{escape}} = \sqrt{2 a_p R} $$
G = The Universal Gravitational Constant, or 6.67 x 10⁻¹¹ (N × m²) / (kg²).
mp = Mass of the planet.
Rp = The Radius of the planet.
ap = The acceleration due to the gravitational pull of the planet on the body.
# INTERNAL GRAVITATIONAL ATTRACTION:
A certain set of characteristics relating to the planet must be met for this equation to work: $$F_g = \frac{G \times m_o \times m_p \times r}{R^3}$$
Fg = The force of gravitational attraction.
G = The Universal Gravitational Constant, or 6.67 x 10⁻¹¹ (N × m²) / (kg²).
mo = Mass of the object.
mp = Mass of the planet/celestial body.
r = The distance of the object from the center of mass of the planet.
R = The actual radius of the planet.
# Electromagnetism
# Electrostatics:
# XII.II Basics of Atomic Physics.
# CHARGE QUANTIZATION:
$$q = n \times e$$q = Net charge on an object.
n = Excess number of charge carriers (protons or electrons or whatever - it just has to be ONE of them).
e = The Elementary Charge Constant.
# XII.III Electric Force.
# LAW OF ELECTRIC FORCE (COULOMB'S LAW):
$$F_{e} = \frac{k \times q_{1} \times q_{2}}{r^2}$$Fe = The magnitude of the electric force that exists between two charged particles.
k = The Coulomb constant, equal to 8.99 × 10⁹ (N × m²) / (C²).
q1 = The net charge on object 1, measured in Coulombs.
q2 = The net charge on object 2, measured in Coulombs.
r = The distance between the centers of charge of the two objects.
# COULOMB'S CONSTANT:
$$k = \frac{1}{4πε_0}$$k = The Coulomb constant, equal to 8.99 × 10⁹ (N × m²) / (C²).
ε0 = "Epsilon Naught", The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²).
# CONSERVATION OF CHARGE:
$$q_{i} = q_{f}$$qi = The total initial charge of the system..
qf = The total final charge of the system.
# XIII.I Introduction to Fields.
# ELECTRIC FIELD:
$$\vec{\mathbf{E}} = \frac{\vec{\mathbf{F_e}}}{q}$$E = The magnitude of the electric field at a particular point.
Fe = The electric force being felt by the charge at the particular point being measured.
q = The magnitude of the charge/charged particle of the particular point being measured.
# XIII.II Continuous Charge Distributions.
# LINEAR CHARGE DENSITY:
The ratio between these values produces the same value, and so λ is equal to both. $$\lambda = \frac{Q}{L}$$ $$\lambda = \frac{dQ}{dL}$$
λ = (Lambda) The direction and magnitude of the given expression, defined in Coulombs per Meter (C / m).
Q = The charge of the object.
L = The length of the object - this form of density is best applied to charge along a flat line.
dQ = An Individual infinitesimally small charge.
dL = The length thereof of the infinitesimally small charge dQ.
# SURFACE CHARGE DENSITY:
The ratio between these values produces the same value, and so σ is equal to both. $$\sigma = \frac{Q}{A}$$ $$\sigma = \frac{dQ}{dA}$$
σ = (Sigma) The direction and magnitude of the given expression, defined in Coulombs per Meter Squared (C / m²).
Q = The charge of the object.
A = The total area of the object.
dQ = An Individual infinitesimally small charge.
dA = The area thereof of the infinitesimally small charge dQ.
# VOLUMETRIC CHARGE DENSITY:
The ratio between these values produces the same value, and so σ is equal to both. $$\rho = \frac{Q}{V}$$ $$\rho = \frac{dQ}{dV}$$
ρ = (Rho) The direction and magnitude of the given expression, defined in Coulombs per Meter Cubed (C / m³).
Q = The charge of the object.
V = The total volume of the object.
dQ = An Individual infinitesimally small charge.
dV = The area thereof of the infinitesimally small charge dQ.
# ELECTRIC FIELD OF A CONTINUOUS CHARGE DISTRIBUTION (CCD):
$$E_{CCD} = k \int \frac{dq}{r^2} \hat{r}$$ECCD = The electric field that exists around a continuous charge distribution, calculated at point r in space.
k = The Coulomb constant, equal to 8.99 × 10⁹ (N × m²) / (C²).
dq = The infinitesimally small point charges, of which there is an infinite number of. This value can be substituted for any of the equivalent charge density derivatives (see Linear, Surface, and Volumetric), pursuant to the nature of a particular problem.
r = The distance between the infinitesimal charge dq and the point where the electric field is being calculated. Unlike the Law of Electric Force, this r is a function that varies depending on the charge, since there is technically an infinite number of charges (dq).
r̂ = The unit vector pointing from dq (whichever charge) toward the test charge - this is most applicable post-integral, when you can have a test charge to calculate the strength of the electric field with respect to. The direction points radially outward for positive dq, and inward for negative dq.
# ELECTRIC FIELD OF FLAT DISKS:
$$E_{disk} = \frac{\sigma}{2\varepsilon_0} \left( 1 - \frac{z}{\sqrt{z^2 + R^2}} \right)$$Edisk = The magnitude of the electric field produced by a uniformly charged flat disk, calculated at some point z from the central axis of said disk.
σ = Surface charge density. See treatise here.
ε0 = The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²).
z = The distance (along the central axis) between the point at which the electric field is being measured, and the center of the disk. z ≥ 0.
R = The radius of the disk.
# ELECTRIC FIELD OF INFINITE PLANES:
$$E_{plane} = \frac{\sigma}{2\varepsilon_0}$$Eplane = The magnitude of the electric field of an infinite plane, independent of distance from the plane (interestingly).
σ = Surface charge density. See treatise here.
ε0 = The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²).
# XIII.III Dipole Moment.
# ELECTRIC FIELD OF A DIPOLE:
$$\vec{E}_{\text{dipole}} = \left( \frac{1}{2\pi \varepsilon_0} \right) \left( \frac{qd}{z^3} \right)$$Edipole = The electric field produced by a dipole along its axis, calculated with respect to the distance between the test charge and the dipole midpoint.
ε0 = The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²).
q = The absolute value of the charge of either particle.
d = The distance between the particles.
z = The distance between the test charge (the point at which the electric field is being calculated, which, being somewhere on the dipole axis, will be directly above or below the particles) and the dipole midpoint (d/2). z MUST be >>> to d, for reasons detailed in the proof (see Rule 181).
# XIV.I Uniform Flux.
# UNIFORM ELECTRIC FLUX:
$$\Phi_E = \vec{E} \times \vec{A} \cos(\theta)$$ΦE = The magnitude of Electric Flux over a Uniform Electric Field (see definition below).
E = The magnitude of a uniform electric field, the amount of which (see Rule 184) is measured over a surface and not just at an individual point in space (though, being uniform, it will have the same strength at any individual point in space). Given how the existing Electric Field equation (see Rule 172) only specifically calculates the magnitude of an electric force at a point, this equation is overly idealized in assuming a uniform electric field (therefore not a point charge or anything similar).
A = The magnitude of the area of the surface through which the uniform electric field is passing. AREA, not VOLUME (explained in def.).
θ = The angle between the directions of the electric field and the direction of the area (area having its direction perpendicular to the plane, and directed outward for closed surfaces). This value, given that all other values in the equation are positive magnitudes, determines whether the flux is positive or negative.
# XIV.II Charge-Flux Law.
# NONUNIFORM ELECTRIC FLUX (CHARGE-FLUX LAW):
$$\Phi_E = \oint \vec{E} d\vec{A} \cos\theta = \frac{q_{\text{enclosed}}}{\varepsilon_0}$$ΦE = The electric flux through a closed surface. Measured in (Newtons × Meters²) / Coulombs.
E = The magnitude of a uniform electric field, measured in relation to its strength at the infinitesimally small area (essentially a point) dA.
dA = An infinitesimally small area of the surface plane, each of which is collectively represented by dA in the integral.
θ = The angle between the directions of the electric field and the direction of the infinitesimally small area dA (area having its direction perpendicular to the plane, and directed outward for closed surfaces). This value, given that all other values in the equation are positive magnitudes, determines whether the flux is positive or negative.
qenclosed = The charge enclosed in the Gaussian Surface (see Rule 190).
ε0 = The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²). (see Rule 165).
# XIV.III New Electric Fields.
# ELECTRIC FIELD ON A CONDUCTOR'S SURFACE:
$$E = \frac{\sigma}{ε_0}$$E = The electric field on the surface of a conductor.
σ = The charge per unit area on the surface of the conductor.
ε0 = The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²).
# ELECTRIC FIELD ON A NONCONDUCTOR'S SURFACE:
$$E = \frac{\sigma}{2ε_0}$$E = The electric field on the surface of a nonconductor.
σ = The charge per unit area on the surface of the nonconductor.
ε0 = The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²).
# ELECTRIC FIELD NEAR AN INFINITE CHARGED LINE:
$$E_{rod} = \frac{\lambda}{2\pi \varepsilon_0 r}$$E = The magnitude of the electric field near (at a distance r from) a charged rod.
λ = Linear Charge Density. See treatise here.
ε0 = The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²).
r = The perpendicular distance from the line to the point.
# ELECTRIC FIELD OUTSIDE OF A SPHERE:
$$E_{outside} = \frac{1}{4\pi \varepsilon_0} \frac{q}{r^2}$$Eoutside = The magnitude of the outward electric field created by a shell with uniform charge density.
ε0 = The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²).
q = The total enclosed charge, namely that within the shell's material.
r = The distance to the point of measurement from the center of the shell, retricted to where r ≥ b.
# ELECTRIC FIELD INSIDE OF A SPHERE:
$$E_{within} = \frac{1}{4\pi \varepsilon_0} \frac{q}{b^3} r$$Ewithin = The magnitude of the electric field within the material of a shell, between a and b.
ε0 = The Permittivity of Free Space, equal to 8.85 × 10⁻¹² (C²) / (N × m²).
q = The total charge WITHIN the specified radius; the charge between the inner surface of the shell and the specified radius r. All charge within the shell but outside of the radius r is irrelevant and not included in this subsphere.
b = The full radius of the shell, from center to external surface.
r = The radius from the center of the sphere to the point of measurement between a and b. This is akin to creating a smaller shell (cutting out the material between r and b) and measuring the electric field at its surface.


{kind=link}